 Оси мира паранормальное рядом
Оси мира паранормальное рядом
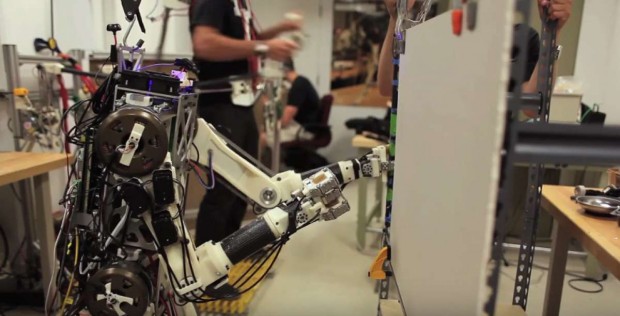
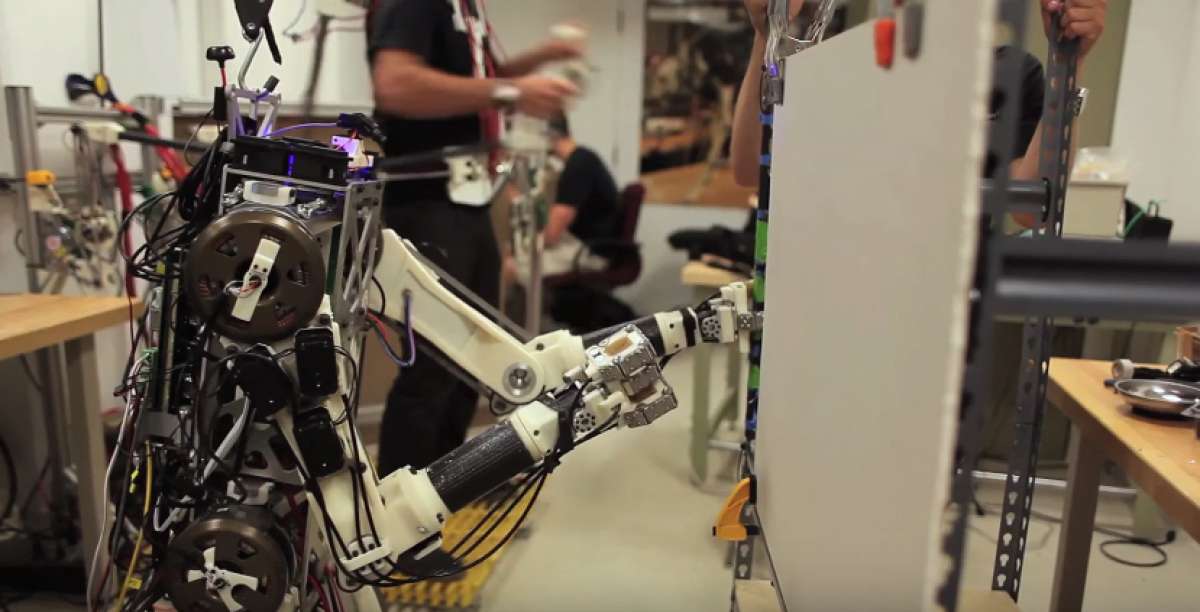
Робототехники из Массачусетского технологического института создают робота HERMES. Гуманоидная машина рефлекторно управляется человеком, облаченным в специальный экзоскелет. Подобную систему управления, только более масштабную, вы могли видеть, например, в фантастическом фильме «Тихоокеанский рубеж». За исключением, пожалуй, того, что здесь человек не сидит внутри робота. Да и не для того в реальности ведутся подобные разработки. Основной задачей подобных роботов в будущем будут спасательные операции.
Жоао Рамос, один из создателей робота, описывает этот проект как «попытку внедрения человеческого мозга в робота». HERMES имеет две ноги и две руки, на каждой из которых по три пальца. Благодаря рефлекторному управлению робот способен не только крушить, скажем, гипсокартонные стенки, но и деликатно наливать вам кофе.
Однако главная инновация в этом роботе — не его руки. Главное здесь — сенсоры. Чтобы движения робота больше походили на человеческие, его сенсоры подают сигналы обратной отдачи в экзоскелет человека, который им управляет и тот может корректировать его движения, как это бы сделал любой другой человек в той или иной ситуации. Благодаря такому «заимствованию» рефлексов робот способен учиться.
Управление руками робота происходит благодаря двум встроенным в экзоскелет контроллерам. На голову робота установлена камера, которая передает изображение пилоту-человеку. Другими словами, человек видит все от лица робота и выполняет нужные действия.
Альберт Ванг, еще один специалист, работающий с HERMES, говорит, что следующая версия робота будет управляться человеческими мыслями.


{kind=link}